In this section we need to take a look at the equation of a line in R 3 R 3 . As we saw in the previous section the equation y = m x + b y = m x + b does not describe a line in R 3 R 3 , instead it describes a plane. This doesn’t mean however that we can’t write down an equation for a line in 3-D space. We’re just going to need a new way of writing down the equation of a curve. So, before we get into the equations of lines we first need to briefly look at vector functions. We’re going to take a more in depth look at vector functions later. At this point all that we need to worry about is notational issues and how they can be used to give the equation of a curve. The best way to get an idea of what a vector function is and what its graph looks like is to look at an example. So, consider the following vector function. → r ( t ) = ⟨ t , 1 ⟩ r → ( t ) = ⟨ t , 1 ⟩ A vector function is a function that takes one or more variables, one in this case, and returns a...

Continuous time signals can be classified according to different conditions or operations performed on the signals.
Even and Odd Signals
Even Signal
A signal is said to be even if it satisfies the following condition;
Time reversal of the signal does not imply any change on amplitude here. For example, consider the triangular wave shown below.
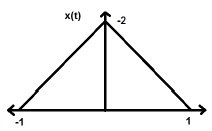
The triangular signal is an even signal. Since, it is symmetrical about Y-axis. We can say it is mirror image about Y-axis.
Consider another signal as shown in the figure below.
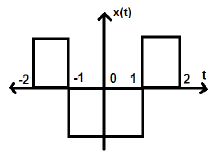
We can see that the above signal is even as it is symmetrical about Y-axis.
Odd Signal
A signal is said to be odd, if it satisfies the following condition
Here, both the time reversal and amplitude change takes place simultaneously.
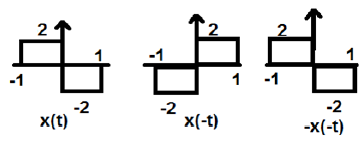
In the figure above, we can see a step signal x(t). To test whether it is an odd signal or not, first we do the time reversal i.e. x(-t) and the result is as shown in the figure. Then we reverse the amplitude of the resultant signal i.e. –x(-t) and we get the result as shown in figure.
If we compare the first and the third waveform, we can see that they are same, i.e. x(t)= -x(-t), which satisfies our criteria. Therefore, the above signal is an Odd signal.
Some important results related to even and odd signals are given below.
- Even × Even = Even
- Odd × Odd = Even
- Even × Odd = Odd
- Even ± Even = Even
- Odd ± Odd = Odd
- Even ± Odd = Neither even nor odd
Representation of any signal into even or odd form
Some signals cannot be directly classified into even or odd type. These are represented as a combination of both even and odd signal.
Where xe(t) represents the even signal and xo(t) represents the odd signal
And
Example
Find the even and odd parts of the signal
Solution − From reversing x(n), we get
Now, according to formula, the even part
Similarly, according to formula the odd part is
Periodic and Non-Periodic Signals
Periodic Signals
Periodic signal repeats itself after certain interval of time. We can show this in equation form as −
Where, n = an integer (1,2,3……)
T = Fundamental time period (FTP) ≠ 0 and ≠∞
Fundamental time period (FTP) is the smallest positive and fixed value of time for which signal is periodic.

A triangular signal is shown in the figure above of amplitude A. Here, the signal is repeating after every 1 sec. Therefore, we can say that the signal is periodic and its FTP is 1 sec.
Non-Periodic Signal
Simply, we can say, the signals, which are not periodic are non-periodic in nature. As obvious, these signals will not repeat themselves after any interval time.
Non-periodic signals do not follow a certain format; therefore, no particular mathematical equation can describe them.
Energy and Power Signals
A signal is said to be an Energy signal, if and only if, the total energy contained is finite and nonzero (0<E<∞). Therefore, for any energy type signal, the total normalized signal is finite and non-zero.
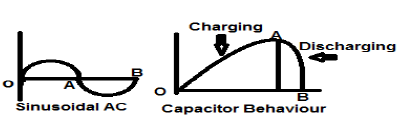
A sinusoidal AC current signal is a perfect example of Energy type signal because it is in positive half cycle in one case and then is negative in the next half cycle. Therefore, its average power becomes zero.
A lossless capacitor is also a perfect example of Energy type signal because when it is connected to a source it charges up to its optimum level and when the source is removed, it dissipates that equal amount of energy through a load and makes its average power to zero.
For any finite signal x(t) the energy can be symbolized as E and is written as;
Spectral density of energy type signals gives the amount of energy distributed at various frequency levels.
Power type Signals
A signal is said to be power type signal, if and only if, normalized average power is finite and non-zero i.e. (0<p<∞). For power type signal, normalized average power is finite and non-zero. Almost all the periodic signals are power signals and their average power is finite and non-zero.
In mathematical form, the power of a signal x(t) can be written as;
Difference between Energy and Power Signals
The following table summarizes the differences of Energy and Power Signals.
| Power signal | Energy Signal |
|---|---|
| Practical periodic signals are power signals. | Non-periodic signals are energy signals. |
| Here, Normalized average power is finite and non-zero. | Here, total normalized energy is finite and non-zero. |
Mathematically,
|
Mathematically,
|
| Existence of these signals is infinite over time. | These signals exist for limited period of time. |
| Energy of power signal is infinite over infinite time. | Power of the energy signal is zero over infinite time. |
Solved Examples
Example 1 − Find the Power of a signal
Solution − The above two signals are orthogonal to each other because their frequency terms are identical to each other also they have same phase difference. So, total power will be the summation of individual powers.
Let
Where and
Power of
Power of
Therefore,
Example 2 − Test whether the signal given is conjugate or not?
Solution − Here, the real part being t2 is even and odd part (imaginary) being is odd. So the above signal is Conjugate signal.
Example 3 − Verify whether is an odd signal or an even signal.
Solution − Given
By time reversal, we will get
But we know that
Therefore,
This is satisfying the condition for a signal to be odd. Therefore, is an odd signal.
Comments
Post a Comment