In this section we need to take a look at the equation of a line in R 3 R 3 . As we saw in the previous section the equation y = m x + b y = m x + b does not describe a line in R 3 R 3 , instead it describes a plane. This doesn’t mean however that we can’t write down an equation for a line in 3-D space. We’re just going to need a new way of writing down the equation of a curve. So, before we get into the equations of lines we first need to briefly look at vector functions. We’re going to take a more in depth look at vector functions later. At this point all that we need to worry about is notational issues and how they can be used to give the equation of a curve. The best way to get an idea of what a vector function is and what its graph looks like is to look at an example. So, consider the following vector function. → r ( t ) = ⟨ t , 1 ⟩ r → ( t ) = ⟨ t , 1 ⟩ A vector function is a function that takes one or more variables, one in this case, and returns a...

There are other signals, which are a result of operation performed on them. Some common type of signals are discussed below.
Conjugate Signals
Signals, which satisfies the condition are called conjugate signals.
Let
So,
And
By Condition,
If we compare both the derived equations 1 and 2, we can see that the real part is even, whereas the imaginary part is odd. This is the condition for a signal to be a conjugate type.
Conjugate Anti-Symmetric Signals
Signals, which satisfy the condition are called conjugate anti-symmetric signal
Let
So
And
By Condition
Now, again compare, both the equations just as we did for conjugate signals. Here, we will find that the real part is odd and the imaginary part is even. This is the condition for a signal to become conjugate anti-symmetric type.
Example
Let the signal given be
Here, the real part being is odd and the imaginary part being is even. So, this signal can be classified as conjugate anti-symmetric signal.
Any function can be divided into two parts. One part being Conjugate symmetry and other part being conjugate anti-symmetric. So any signal x(t) can be written as
Where is conjugate symmetric signal and is conjugate anti symmetric signal
And
Half Wave Symmetric Signals
When a signal satisfies the condition , it is called half wave symmetric signal. Here, amplitude reversal and time shifting of the signal takes place by half time. For half wave symmetric signal, average value will be zero but this is not the case when the situation is reversed.
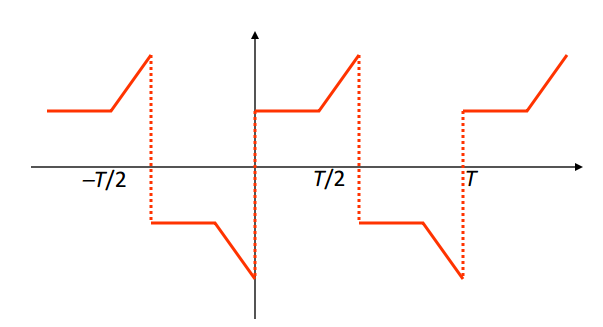
Consider a signal x(t) as shown in figure A above. The first step is to time shift the signal and make it . So, the new signal is changed as shown in figure B. Next, we reverse the amplitude of the signal, i.e. make it as shown in the figure. Since, this signal repeats itself after half-time shifting and reversal of amplitude, it is a half wave symmetric signal.
Orthogonal Signal
Two signals x(t) and y(t) are said to be orthogonal if they satisfy the following two conditions.
Condition 1 − [for non-periodic signal]
Condition 2 − [For periodic Signal]
The signals, which contain odd harmonics (3rd, 5th, 7th ...etc.) and have different frequencies, are mutually orthogonal to each other.
In trigonometric type signals, sine functions and cosine functions are also orthogonal to each other; provided, they have same frequency and are in same phase. In the same manner DC (Direct current signals) and sinusoidal signals are also orthogonal to each other. If x(t) and y(t) are two orthogonal signals and then the power and energy of z(t) can be written as ;
Example
Analyze the signal:
Here, the signal comprises of a DC signal and one sine function. So, by property this signal is an orthogonal signal and the two sub-signals in it are mutually orthogonal to each other.
Comments
Post a Comment