In this section we need to take a look at the equation of a line in R 3 R 3 . As we saw in the previous section the equation y = m x + b y = m x + b does not describe a line in R 3 R 3 , instead it describes a plane. This doesn’t mean however that we can’t write down an equation for a line in 3-D space. We’re just going to need a new way of writing down the equation of a curve. So, before we get into the equations of lines we first need to briefly look at vector functions. We’re going to take a more in depth look at vector functions later. At this point all that we need to worry about is notational issues and how they can be used to give the equation of a curve. The best way to get an idea of what a vector function is and what its graph looks like is to look at an example. So, consider the following vector function. → r ( t ) = ⟨ t , 1 ⟩ r → ( t ) = ⟨ t , 1 ⟩ A vector function is a function that takes one or more variables, one in this case, and returns a...

To test a system, generally, standard or basic signals are used. These signals are the basic building blocks for many complex signals. Hence, they play a very important role in the study of signals and systems.
Unit Impulse or Delta Function
A signal, which satisfies the condition,
is known as unit impulse signal. This signal tends to infinity when t = 0 and tends to zero when t ≠ 0 such that the area under its curve is always equals to one. The delta function has zero amplitude everywhere except at t = 0.

Properties of Unit Impulse Signal
- δ(t) is an even signal.
- δ(t) is an example of neither energy nor power (NENP) signal.
- Area of unit impulse signal can be written as;
- Weight or strength of the signal can be written as;
- Area of the weighted impulse signal can be written as −
Unit Step Signal
A signal, which satisfies the following two conditions −
is known as a unit step signal.
It has the property of showing discontinuity at t = 0. At the point of discontinuity, the signal value is given by the average of signal value. This signal has been taken just before and after the point of discontinuity (according to Gibb’s Phenomena).
If we add a step signal to another step signal that is time scaled, then the result will be unity. It is a power type signal and the value of power is 0.5. The RMS (Root mean square) value is 0.707 and its average value is also 0.5
Ramp Signal
Integration of step signal results in a Ramp signal. It is represented by r(t). Ramp signal
also satisfies the condition

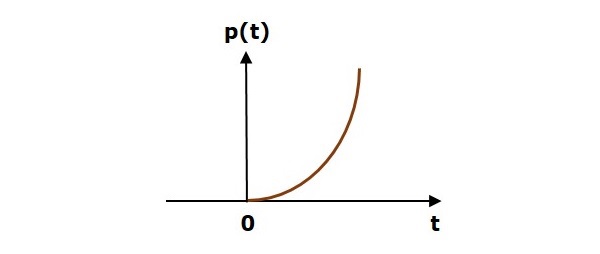
Parabolic Signal
Integration of Ramp signal leads to parabolic signal. It is represented by p(t). Parabolic signal also satisfies the condition
It is neither energy nor Power (NENP) type signal.
Signum Function
This function is represented as
sgn(t)={1−1fort>0fort<0
It is a power type signal. Its power value and RMS (Root mean square) values, both are 1. Average value of signum function is zero.
Sinc Function
It is also a function of sine and is written as −
Properties of Sinc function
-
It is an energy type signal.
-
-
- (Range of sinπ∞ varies between -1 to +1 but anything divided by infinity is equal to zero)
-
If
It is an energy type signal.
If
Sinusoidal Signal
A signal, which is continuous in nature is known as continuous signal. General format of a sinusoidal signal is
Here,
A = amplitude of the signal
ω = Angular frequency of the signal (Measured in radians)
φ = Phase angle of the signal (Measured in radians)
The tendency of this signal is to repeat itself after certain period of time, thus is called periodic signal. The time period of signal is given as;
The diagrammatic view of sinusoidal signal is shown below.

Rectangular Function
A signal is said to be rectangular function type if it satisfies the following condition −
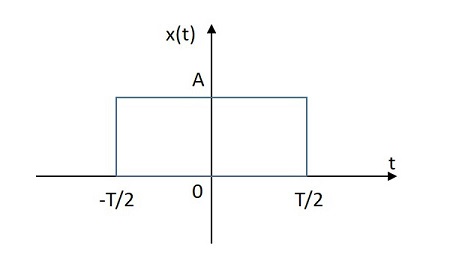
Being symmetrical about Y-axis, this signal is termed as even signal.
Triangular Pulse Signal
Any signal, which satisfies the following condition, is known as triangular signal.
Δ(tτ)={1−(2|t|τ)0for|t|<τ2for|t|>τ2
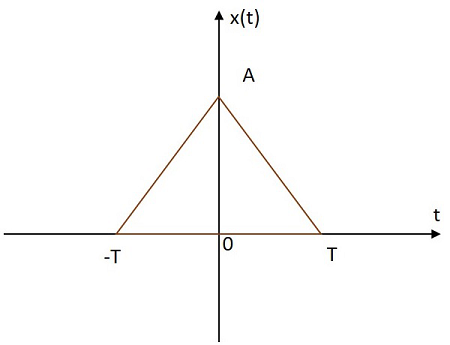
This signal is symmetrical about Y-axis. Hence, it is also termed as even signal.
Comments
Post a Comment